еЊвЊ:1 ПеМфСКЕЅдЊЕФздгЩЖШЖЈвх ЖдгкОпгаСНИіНкЕуЕФПеМфСКЕЅдЊЃЌЩшЦфНкЕузјБъКЭЯргІЕФНкЕуСІШчЯТ: НкЕу(1): НкЕу(2): ЪНжаЃЌ ЮЊжсЯђСІ; ЮЊxyЦНУцФкЕФМєСІ; ЮЊxyЦНУцФкЕФЭфОи; ЮЊxzЦНУцФкЕФМєСІ; ЮЊxzЦНУцФкЕФЭфОи; ЮЊХЄОиЁЃ 2 ПеМфСКЕЅдЊЕФзјБъБфЛЛ ећЬхзјБъЯЕМЧ
1 ПеМфСКЕЅдЊЕФздгЩЖШЖЈвх
ЖдгкОпгаСНИіНкЕуЕФПеМфСКЕЅдЊЃЌЩшЦфНкЕузјБъКЭЯргІЕФНкЕуСІШчЯТ:
НкЕу(1):


НкЕу(2):
ЪНжаЃЌ ЮЊжсЯђСІ;
ЮЊжсЯђСІ; ЮЊxyЦНУцФкЕФМєСІ;
ЮЊxyЦНУцФкЕФМєСІ; ЮЊxyЦНУцФкЕФЭфОи;
ЮЊxyЦНУцФкЕФЭфОи; ЮЊxzЦНУцФкЕФМєСІ;
ЮЊxzЦНУцФкЕФМєСІ; ЮЊxzЦНУцФкЕФЭфОи;
ЮЊxzЦНУцФкЕФЭфОи; ЮЊХЄОиЁЃ
ЮЊХЄОиЁЃ
НкЕу(2):
ЪНжаЃЌ
ЮЊжсЯђСІ;ЮЊxyЦНУцФкЕФМєСІ;ЮЊxyЦНУцФкЕФЭфОи;ЮЊxzЦНУцФкЕФМєСІ;ЮЊxzЦНУцФкЕФЭфОи;ЮЊХЄОиЁЃ
2 ПеМфСКЕЅдЊЕФзјБъБфЛЛ
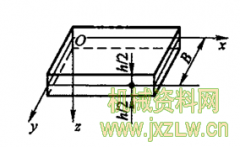
ећЬхзјБъЯЕМЧЮЊOXYZ,СКЕЅдЊЕФОжВПзјБъЯЕМЧЮЊoxyzЃЌЦфжаoxжсе§ЗНЯђгЩiЖЫНиУцаЮаФжИЯђjЖЫУцаЮаФЃЌyжсКЭzжсЪЧСКНиУцЕФСНИіЯрЛЅДЙжБЕФаЮаФжїжсЃЌМћЭМ39.5-3ЁЃзјБъБфЛЛЙЋЪНОпгаШчЯТаЮЪН:
гЩОжВПзјБъЯђећЬхзјБъЕФЮЛвЦБфЛЛЙЋЪНЪЧ
ећЬхзјБъЯЕМЧЮЊOXYZ,СКЕЅдЊЕФОжВПзјБъЯЕМЧЮЊoxyzЃЌЦфжаoxжсе§ЗНЯђгЩiЖЫНиУцаЮаФжИЯђjЖЫУцаЮаФЃЌyжсКЭzжсЪЧСКНиУцЕФСНИіЯрЛЅДЙжБЕФаЮаФжїжсЃЌМћЭМ39.5-3ЁЃзјБъБфЛЛЙЋЪНОпгаШчЯТаЮЪН:
гЩОжВПзјБъЯђећЬхзјБъЕФЮЛвЦБфЛЛЙЋЪНЪЧ

НкЕуСІЕФБфЛЛЙЋЪНЪЧ

ЕЅдЊИеЖШОиеѓБфЛЛЙЋЪНЪЧ

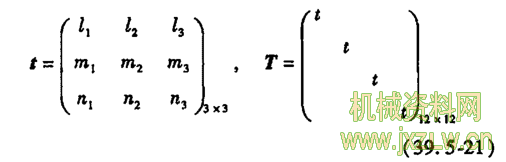
дкШ§ЮЌПеМфжаЃЌЩшx,y,zЪЧОжВПзјБъЯЕЃЌX,Y, ZЪЧећЬхзјБъЯЕЃЌЕЅдЊОжВПзјБъЯЕЕФШ§ИізјБъжсЕФЗНЯђгрЯвЗжБ№ШчЯТЪН:
зјБъБфЛЛОиеѓЕФОпЬхМЦЫуЗНЗЈАќРЈШчЯТВНжш:
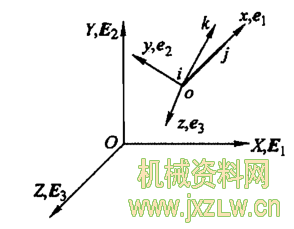
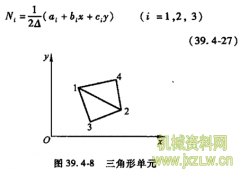
ЭМ39.5-3ПеМфСКЕЅдЊЕФзјБъБфЛЛ
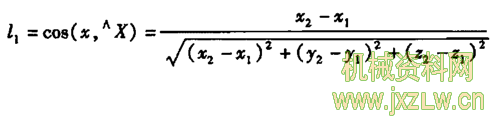
1)ОжВПзјБъЯЕxжсдкећЬхзјБъЯЕжаЕФЗНЯђгрЯв:
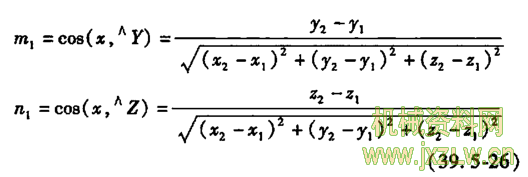
2)ОжВПзјБъЯЕyжсдкећЬхзјБъЯЕжаЕФЗНЯђгрЯвЁЃ
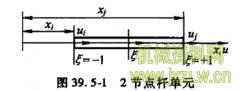
ЯждкЬжТлОпгаШЮвтЗНЯђЕФПеМфСКЕЅдЊЁЃЪзЯШЃЌгЩНкЕуi,jдкећЬхзјБъЯЕЯТЕФзјБъМДПЩШЗЖЈ
 дкећЬхзјБъЯЕжаЕФШ§ИіЗНЯђгрЯвЃЌМД
дкећЬхзјБъЯЕжаЕФШ§ИіЗНЯђгрЯвЃЌМД
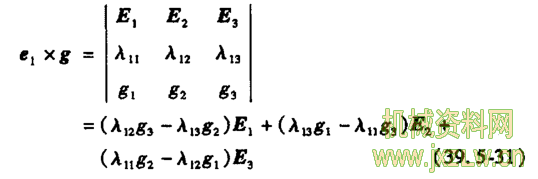
Цфжа

ЯТУцМЦЫу КЭ
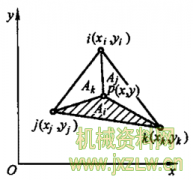
КЭ дкЕЅдЊЕФжїЙпадЦНУцoxyЩЯШЮШЁвЛЕуk(ЕЋkЕуВЛФмШЁдкoxжсЩЯ)ЃЌkЕудкећЬхзјБъЯЕжаЕФзјБъМЧЮЊ
дкЕЅдЊЕФжїЙпадЦНУцoxyЩЯШЮШЁвЛЕуk(ЕЋkЕуВЛФмШЁдкoxжсЩЯ)ЃЌkЕудкећЬхзјБъЯЕжаЕФзјБъМЧЮЊ ,биЯђСП
,биЯђСП ЗНЯђШЁЯђСПg,gдкећ ЬхзјБъЯЕжаЕФШ§ИіЗжСПЪЧ
ЗНЯђШЁЯђСПg,gдкећ ЬхзјБъЯЕжаЕФШ§ИіЗжСПЪЧ
КЭдкЕЅдЊЕФжїЙпадЦНУцoxyЩЯШЮШЁвЛЕуk(ЕЋkЕуВЛФмШЁдкoxжсЩЯ)ЃЌkЕудкећЬхзјБъЯЕжаЕФзјБъМЧЮЊ,биЯђСПЗНЯђШЁЯђСПg,gдкећ ЬхзјБъЯЕжаЕФШ§ИіЗжСПЪЧ
вђzжсДЙжБгкoxyЦНУцЃЌЖј
 КЭgОљдкoxyЦНУцЩЯЃЌЙЪПЩШЁ
КЭgОљдкoxyЦНУцЩЯЃЌЙЪПЩШЁ
ЩЯСНЪНМДМЦЫу
 КЭ
КЭ ЕФЙЋЪНЁЃЫГБуЫЕУїЃЌШчЙћАбkЕуШЁдкoyжсЩЯЃЌдђМЦЫуНЋИќЮЊМђЕЅЁЃвђЖјЃЌЖдЫљЬжТлЕФОпЬхЮЪЬтЖјбдЃЌШчЙћШнвзИјГіСКНиУцаЮаФжїжсoyЩЯвЛЕуkЕФзјБъЃЌдђгІдкoyжсЩЯбЁШЁЕуkЁЃМЦЫу
ЕФЙЋЪНЁЃЫГБуЫЕУїЃЌШчЙћАбkЕуШЁдкoyжсЩЯЃЌдђМЦЫуНЋИќЮЊМђЕЅЁЃвђЖјЃЌЖдЫљЬжТлЕФОпЬхЮЪЬтЖјбдЃЌШчЙћШнвзИјГіСКНиУцаЮаФжїжсoyЩЯвЛЕуkЕФзјБъЃЌдђгІдкoyжсЩЯбЁШЁЕуkЁЃМЦЫу КЭ
КЭ ЕФОпЬхВНжшШчЯТ:
ЕФОпЬхВНжшШчЯТ:
гЩЯђЭЏВцГЫЗЈдђЃК
дйМЧ
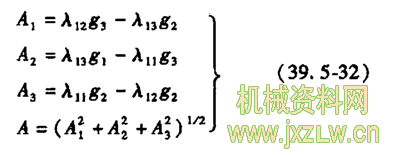
дђдйМЧ

ДгЖј

зюКѓга
МДЕУдкећЬхзјБъЯЕжаЕФШ§ИіЗНЯђгрЯвЮЊ
МЦЫуВНжшМђЪіШчЯТ:
1)гЩИјЖЈЕФЕЅдЊСНЖЫНкЕудкећЬхзјБъЯЕЯТЕФзјБъ КЭ
КЭ ЃЌЫуГі
ЃЌЫуГі
КЭЃЌЫуГі
2)гЩИјЖЈЕФАќКЌoxжсдкФкЕФЕЅдЊжїЙпадЦНУцЩЯвЛЕуkЕФзјБъ ЃЌЫуГі
ЃЌЫуГі
3)ЫуГі


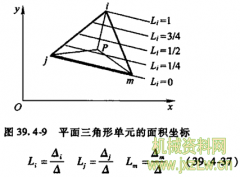
ЕБПеМфСКЕЅдЊЕФвЛЖЫЛђСНЖЫНТНгЪБЃЌПЩгУФ§ОлздгЩЖШЗЈЖдЯрЙиздгЩЖШНјааДІРэ.дкЯрЙиЕФааСаЩЯВЙГф0дЊЫи
ЃЌЫуГі3)ЫуГі
4)ЫуГіОиеѓ ЕФЕкЖўааКЭЕкШ§ааЁЃ
ЕФЕкЖўааКЭЕкШ§ааЁЃ
ЕФЕкЖўааКЭЕкШ§ааЁЃ
зюКѓжИГіЃЌЕуkВЛФмШЁдкoxжсЩЯЃЌЗёдђ гыgЙВЯпЃЌ
гыgЙВЯпЃЌ МЦЫуЙ§ГЬЮоЗЈМЬајНјааЁЃ
МЦЫуЙ§ГЬЮоЗЈМЬајНјааЁЃ
3 ПеМфСКЕЅдЊЕФЕЅдЊИеЖШОиеѓ
гыgЙВЯпЃЌМЦЫуЙ§ГЬЮоЗЈМЬајНјааЁЃ3 ПеМфСКЕЅдЊЕФЕЅдЊИеЖШОиеѓ
ПеМфСКЕЅдЊЕФ12ИіздгЩЖШЪЧ Цфжа
Цфжа ЪНжа
ЪНжа  ЮЊНкЕуiдкОжВПзјБъЯЕжа3ИіЗНЯђЕФЯпЮЛвЦ;
ЮЊНкЕуiдкОжВПзјБъЯЕжа3ИіЗНЯђЕФЯпЮЛвЦ; ЮЊНкЕуiДІНиУцШЦ3ИізјБъжсЕФзЊНЧ—
ЮЊНкЕуiДІНиУцШЦ3ИізјБъжсЕФзЊНЧ— ДњБэНиУцЕФХЄзЊЃЌ
ДњБэНиУцЕФХЄзЊЃЌ ЗжБ№ДњБэНиУц дкxzКЭxyзјБъУцФкЕФзЊ ЖЏЁЃШ§ИіЯпЮЛвЦЗжБ№ЖдгІНкЕуiЕФжсЯђСІКЭxzЁЂxyУцФкЕФМєСІЃЌШ§ИізЊНЧЖдгІНкЕуiЕФХЄОиКЭxzЁЂxyУцФкЕФЭфОиЁЃ
ЗжБ№ДњБэНиУц дкxzКЭxyзјБъУцФкЕФзЊ ЖЏЁЃШ§ИіЯпЮЛвЦЗжБ№ЖдгІНкЕуiЕФжсЯђСІКЭxzЁЂxyУцФкЕФМєСІЃЌШ§ИізЊНЧЖдгІНкЕуiЕФХЄОиКЭxzЁЂxyУцФкЕФЭфОиЁЃ
ЦфжаЪНжа ЮЊНкЕуiдкОжВПзјБъЯЕжа3ИіЗНЯђЕФЯпЮЛвЦ;ЮЊНкЕуiДІНиУцШЦ3ИізјБъжсЕФзЊНЧ—ДњБэНиУцЕФХЄзЊЃЌЗжБ№ДњБэНиУц дкxzКЭxyзјБъУцФкЕФзЊ ЖЏЁЃШ§ИіЯпЮЛвЦЗжБ№ЖдгІНкЕуiЕФжсЯђСІКЭxzЁЂxyУцФкЕФМєСІЃЌШ§ИізЊНЧЖдгІНкЕуiЕФХЄОиКЭxzЁЂxyУцФкЕФЭфОиЁЃ
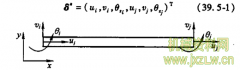
ЕЅдЊФкШЮвтЕуЕФЮЛвЦЮЊ

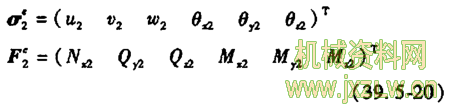
ЪНжаЃЌNЮЊаЮКЏЪ§Оиеѓ;жсЯђЮЛвЦКЭХЄзЊНЧВЩгУЯпадЮЛвЦГЁКЏЪ§ЃЌ ;КсЯђЮЛвЦВЩгУ
;КсЯђЮЛвЦВЩгУ
 ЃЌЁЃ
ЃЌЁЃ
ЪНжаЃЌNЮЊаЮКЏЪ§Оиеѓ;жсЯђЮЛвЦКЭХЄзЊНЧВЩгУЯпадЮЛвЦГЁКЏЪ§ЃЌ
;КсЯђЮЛвЦВЩгУ ЃЌЁЃ
ЩшСКЕЅдЊКсНиУцУцЛ§ЮЊAЃЌдкxzУцФкНиУцЙпадОиЮЊ ЃЌдкxyУцФкНиУцЙпадОиЮЊ
ЃЌдкxyУцФкНиУцЙпадОиЮЊ ЃЌЕЅдЊЕФХЄзЊЙпадОиЮЊ
ЃЌЕЅдЊЕФХЄзЊЙпадОиЮЊ ЃЌГЄЖШЮЊlЃЌВФСЯЕЏадФЃСПКЭЧаБфФЃСПЮЊEЁЂGЁЃЕМГідкОжВПзј БъЯЕФкЕФПеМфСКЕЅдЊИеЖШОиеѓЪЧ
ЃЌГЄЖШЮЊlЃЌВФСЯЕЏадФЃСПКЭЧаБфФЃСПЮЊEЁЂGЁЃЕМГідкОжВПзј БъЯЕФкЕФПеМфСКЕЅдЊИеЖШОиеѓЪЧ
ЃЌдкxyУцФкНиУцЙпадОиЮЊЃЌЕЅдЊЕФХЄзЊЙпадОиЮЊЃЌГЄЖШЮЊlЃЌВФСЯЕЏадФЃСПКЭЧаБфФЃСПЮЊEЁЂGЁЃЕМГідкОжВПзј БъЯЕФкЕФПеМфСКЕЅдЊИеЖШОиеѓЪЧ ЕБПеМфСКЕЅдЊЕФвЛЖЫЛђСНЖЫНТНгЪБЃЌПЩгУФ§ОлздгЩЖШЗЈЖдЯрЙиздгЩЖШНјааДІРэ.дкЯрЙиЕФааСаЩЯВЙГф0дЊЫи
ЩЯвЛЦЊЃКИЫСКЮЪЬтЕФгаЯодЊ-ЦНУцСКЕЅдЊ
| ЮФеТЗжЯэЃК |
|