еЊвЊ:ЩшвЛИіЦНУцСКЕЅдЊгаСНИіНкЕуЃЌШчЭМ39.5-2ЫљЪОЁЃдкОжВПзјБъЯЕФкЃЌЦНУцСКЕЅдЊЖЈвхга6ИіздгЩЖШ: ЭМ39.5вЛЦНУцСКЕЅдЊ ТдШЅжсЯђЮЛвЦЃЌЦНУцСКЕЅдЊгаШчЯТ4ИіздгЩЖШ ЖдгкЦНУцСКЕЅдЊЃЌЦфЭфЧњБфаЮЕФЮЛвЦГЁ ЩшЮЊЯТЪН: вдМА ДњШЫНкЕуЮЛвЦКЭНкЕузјБъЃЌ (ЦфжаЃЌIЮЊСКЕЅдЊЕФ
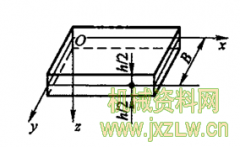
ЩшвЛИіЦНУцСКЕЅдЊгаСНИіНкЕуЃЌШчЭМ39.5-2ЫљЪОЁЃдкОжВПзјБъЯЕФкЃЌЦНУцСКЕЅдЊЖЈвхга6ИіздгЩЖШ:
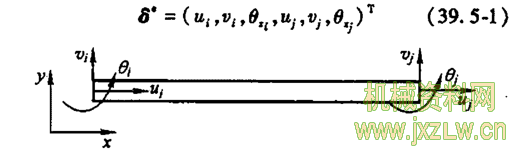
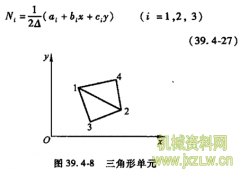
ЭМ39.5вЛЦНУцСКЕЅдЊ
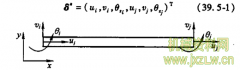
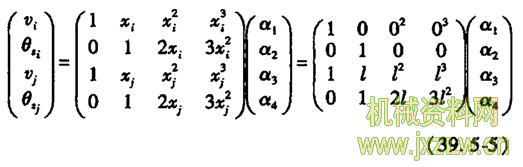
ТдШЅжсЯђЮЛвЦЃЌЦНУцСКЕЅдЊгаШчЯТ4ИіздгЩЖШ

ЖдгкЦНУцСКЕЅдЊЃЌЦфЭфЧњБфаЮЕФЮЛвЦГЁ
ЩшЮЊЯТЪН:

вдМА

ДњШЫНкЕуЮЛвЦКЭНкЕузјБъЃЌ
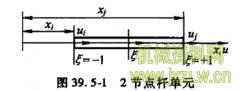
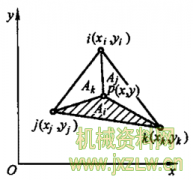
(ЦфжаЃЌIЮЊСКЕЅдЊЕФГЄЖШЃЉЃЌЕУЕН
ЕУЕНгУаЮКЏЪ§ОиеѓБэДяЕФЕЅдЊФкШЮвЛЕуЕФЮЛвЦЪЧ
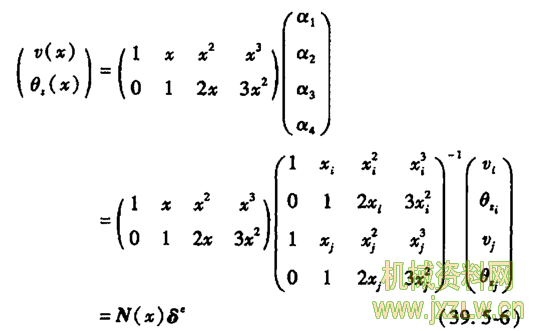
ЪНжаЃЌN(x)ЮЊЦНУцСКЕЅдЊЕФаЮКЏЪ§: ЮЊНкЕуЮЛвЦЯђСПЃЌ
ЮЊНкЕуЮЛвЦЯђСПЃЌ ЁЃЖдгк
ЁЃЖдгк

(ЦфжаЃЌIЮЊСКЕЅдЊЕФГЄЖШЃЉЃЌЕУЕН
ЕУЕНгУаЮКЏЪ§ОиеѓБэДяЕФЕЅдЊФкШЮвЛЕуЕФЮЛвЦЪЧ
ЪНжаЃЌN(x)ЮЊЦНУцСКЕЅдЊЕФаЮКЏЪ§:
ЮЊНкЕуЮЛвЦЯђСПЃЌЁЃЖдгк
ЪНжаN(x)ЕФОпЬхБэДяЪНЪЧ
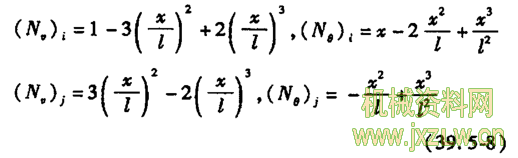
ИљОнзюаЁЪЦФмдРэЕМГіЕЅдЊИеЖШОиеѓЁЃЭфЧњСКЕФгІБфФмЪЧ
ЪНжа
Цфжа
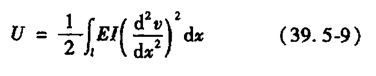
ДњШЫСЛЕЅдЊгІБфФмЙЋЪНЃЌЭЌЪБМйЩшElЖдгкИУЕЅдЊЖјбдЪЧГЃЭЏЃЌЕУЕЅдЊгІБфФм

НкЕуЮЛвЦЯђСП ВЛЪЧxЕФКЏЪ§ЃЌЩЯЪНПЩвдаДГЩ
ВЛЪЧxЕФКЏЪ§ЃЌЩЯЪНПЩвдаДГЩ

ВЛЪЧxЕФКЏЪ§ЃЌЩЯЪНПЩвдаДГЩ
гІБфФмЕФвЛАуаЮЪНПЩвдБэДяГЩ

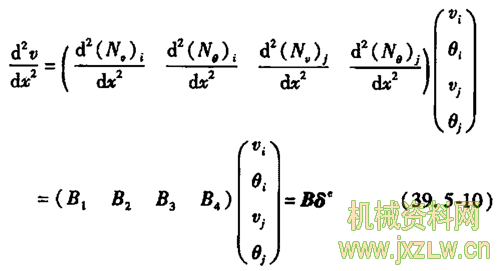
ЪНжаЃЌ ЮЊЦНУцСКЕЅдЊЕФЕЅдЊИеЖШОиеѓЃЌМД
ЮЊЦНУцСКЕЅдЊЕФЕЅдЊИеЖШОиеѓЃЌМД
ЮЊЦНУцСКЕЅдЊЕФЕЅдЊИеЖШОиеѓЃЌМД
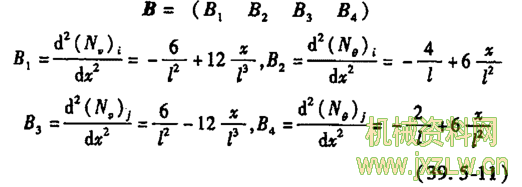
ПМТЧЕНBЪЧxЕФКЏЪ§ЃЌЩЯЪНЛ§ЗжКѓЕУОжВПзјБъЯЕЯТЕФЦНУцСКЕЅдЊЕФЕЅдЊИеЖШОиеѓ

ЧАУцИјГіЕФЦНУцЕЅдЊИеЖШОиеѓЪЧОжВПзјБъЯЕЯТЕФБэДяЪНЃЌЦфзјБъЗНЯђЪЧгЩЕЅдЊЗНЯђШЗЖЈЕФЁЃдкИїздЕФОжВПзјБъЯЕЯТЃЌИїИіВЛЭЌЗНЯђЕФСКЕЅдЊЖМОпгаЭГвЛаЮЪНЕФЕЅдЊИеЖШОиеѓЁЃ дкзщМЏећЬхИеЖШОиеѓЪБЃЌБиаыНЈСЂвЛИіЭГвЛЕФећЬхзјБъЯЕЃЌНЋЫљгаЕЅдЊЩЯЕФНкЕуСІЁЂНкЕуЮЛвЦКЭЕЅдЊИеЖШОиеѓЖМНјаазјБъБфЛЛЃЌБфГЩећЬхзјБъЯЕЯТЕФБэДяЪНжЎКѓЃЌдйзщМЏГЩећЬх Ие ЖШОиеѓЁЃОжВПзјБъЯЕЯђећЬхзјБъЯЕЕФзЊЛЛЙиЯЕШчЯТ:
Щш ЃЌЗжБ№БэЪООжВПзјБъЯЕ
ЃЌЗжБ№БэЪООжВПзјБъЯЕ ЯТЕФЕЅдЊНкЕуСІ(АќРЈЕШаЇНкЕуСІ)ЁЂНкЕуЮЛвЦКЭЕЅдЊИеЖШОиеѓЃЌ
ЯТЕФЕЅдЊНкЕуСІ(АќРЈЕШаЇНкЕуСІ)ЁЂНкЕуЮЛвЦКЭЕЅдЊИеЖШОиеѓЃЌ ЗжБ№БэЪОећЬхзјБъЯЕ0xyzЯТЕФЕЅдЊНкЕуСІЁЂНкЕуЮЛвЦКЭЕЅдЊИеЖШОиеѓЃЌTЪЧСНжжзј
ЗжБ№БэЪОећЬхзјБъЯЕ0xyzЯТЕФЕЅдЊНкЕуСІЁЂНкЕуЮЛвЦКЭЕЅдЊИеЖШОиеѓЃЌTЪЧСНжжзј
Щш
ЃЌЗжБ№БэЪООжВПзјБъЯЕЯТЕФЕЅдЊНкЕуСІ(АќРЈЕШаЇНкЕуСІ)ЁЂНкЕуЮЛвЦКЭЕЅдЊИеЖШОиеѓЃЌЗжБ№БэЪОећЬхзјБъЯЕ0xyzЯТЕФЕЅдЊНкЕуСІЁЂНкЕуЮЛвЦКЭЕЅдЊИеЖШОиеѓЃЌTЪЧСНжжзј
БъЯЕжЎМфЕФзЊЛЛОиеѓЁЃСНжжзјБъЯЕЯТЕФНкЕудиКЩЁЂНкЕуЮЛвЦКЭЕЅдЊИеЖШОиеѓЕФБфЛЛЙиЯЕЮЊ

ЦфжазјБъБфЛЛОиеѓЮЊ
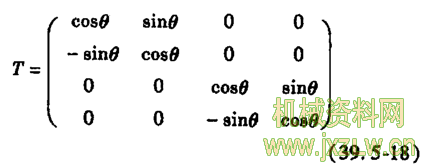
ЪНжаЃЌθЪЧ
 жсЯрЖдгкxжсЕФМаНЧЁЃПЩвджЄУїЃЌзЊЛЛОиеѓTЕФФцОиеѓЕШгкЫќЕФзЊжУОиеѓЁЃ
жсЯрЖдгкxжсЕФМаНЧЁЃПЩвджЄУїЃЌзЊЛЛОиеѓTЕФФцОиеѓЕШгкЫќЕФзЊжУОиеѓЁЃ(д№ШЮБрМЃКlaugh521521)
ЩЯвЛЦЊЃКИЫСКЮЪЬтЕФгаЯодЊ-ИЫЕЅдЊ
ЯТвЛЦЊЃКИЫСКЮЪЬтЕФгаЯодЊ-ПеМфСКЕЅдЊ
| ЮФеТЗжЯэЃК |
|