2.4.3坐标变换和运动描述
绕坐标轴旋转的齐次变换矩阵,可通过在旋转矩阵中加上第4行和第4列而得到,即

绕任意轴旋转时也是如此。当只有移动运动时,齐次变换矩阵变为
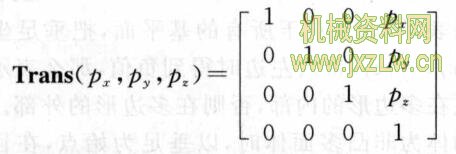
利用前述旋转变换的逆变换,即可求出如下齐次变换的逆变换:

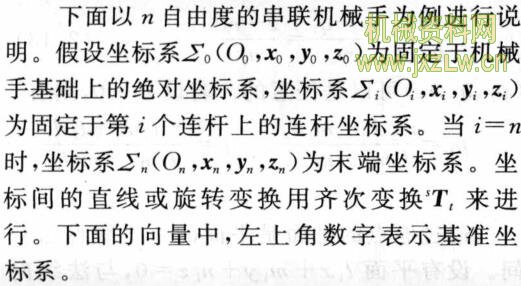
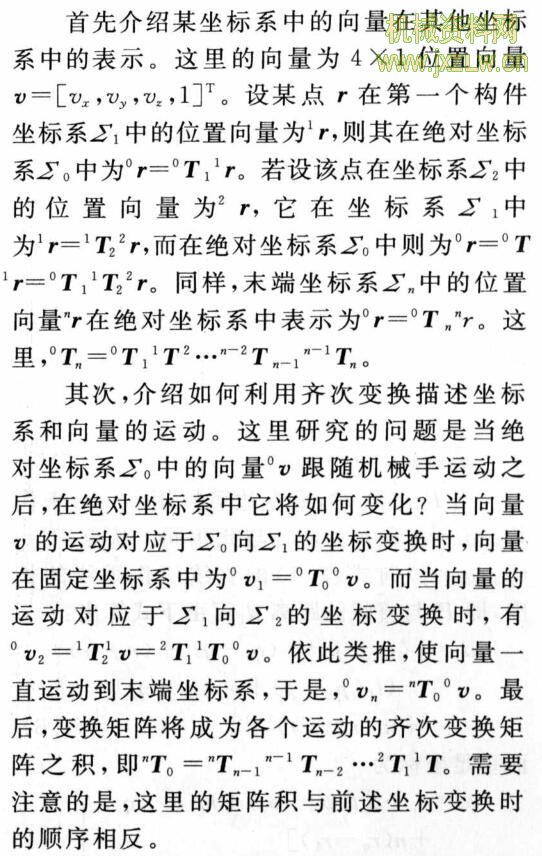
齐次变换在机器人领域中的应用主要体现在两个方面:第一,作为坐标之间的变换矩阵,将某一坐标系中的向量在另一个坐标系中表示出来,如机器人的运动学、动力学分析,以及视觉传感等;第二,描述坐标系和向量的运动,如机器人的动作分析。
在求齐次变换矩阵时,往往需要计算多个齐次变换矩阵的积.但在上述两种场合,变换积的计算方法不同.
(责任编辑:laugh521521)
下一篇:数学基础-解析几何
| 文章分享: |
|

















