2.4.2齐次变换矩阵的构成要素
(责任编辑:laugh521521)
下面来分析齐次变换矩阵的含义。
旋转矩阵的各个列向量为正规正交向量,满足如下关系:



利用上述性质,可以导出如下关系:
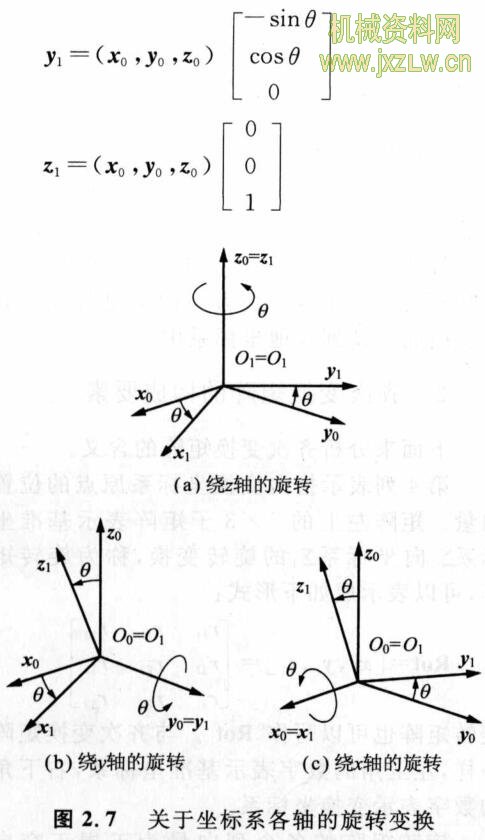
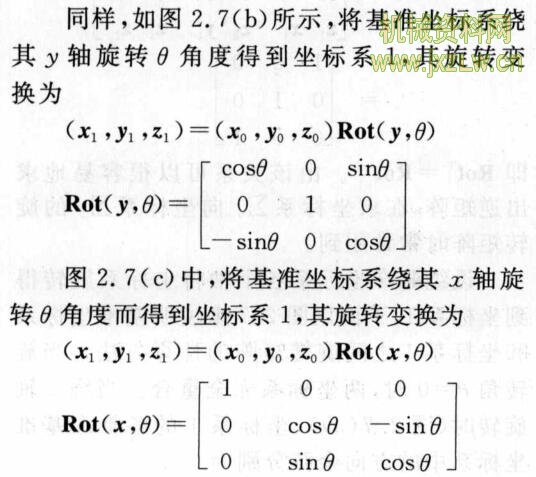
设绕基准坐标系各个轴将坐标系旋转得到坐标系1,下面用图2.7来说明基准坐标系和坐标系1之间旋转矩阵的计算方法。当旋转角e=0时,两坐标系完全重合。当绕z轴旋转时(图2. 7(a)),坐标系1的各轴在基准坐标系中的方向余弦分别为
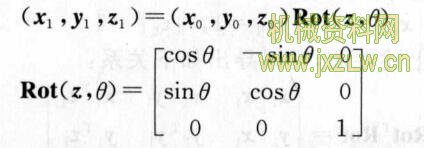
整理以上三个式子,得出绕不轴的旋转变换为
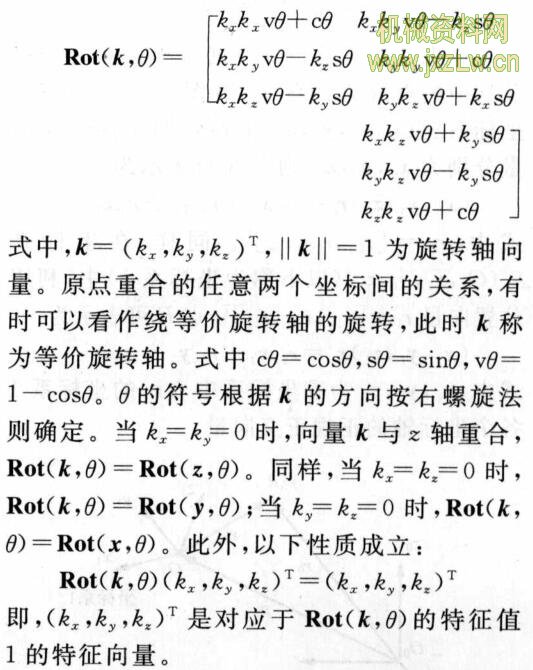


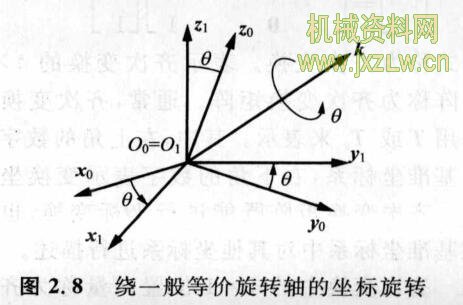
一般来说,在机械手各个关节的坐标系中,都是将关节旋转轴或移动运动方向定义为坐标系的特定坐标轴(在Denavit-Harten-berg法中定义为z轴)。故上述旋转变换矩阵常常会被引用。不过,为了描述空间物体的姿态,也有很多场合需要坐标系绕任意轴旋转。图2.8中坐标系绕任意向量k旋转0角度时,其旋转变换可以表示成如下形式:
还可通过连续进行多次单纯的旋转变换来描述一次等价旋转。例如,某坐标系绕向量k旋转0所得到的姿态存在如下解:
不过这并不是唯一解。在描述三维欧氏空间内的任意旋转时,常用到3个固定角,或者说三个欧拉角。这里需要注意的是,分解成的几个旋转变换,只要旋转轴不全是空间平行的,在一般情况下,旋转顺序不同旋转变换的结果也不同,即
齐次变换矩阵也具有同样的性质。
(责任编辑:laugh521521)
| 文章分享: |
|

















