2.5.1基础知识
1.直线

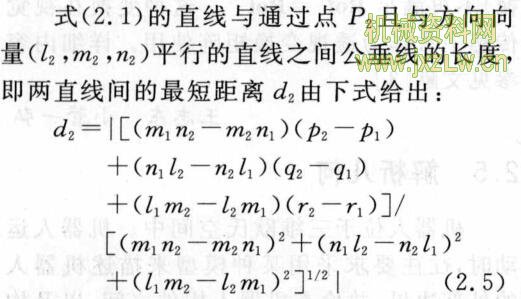
而垂足坐标为

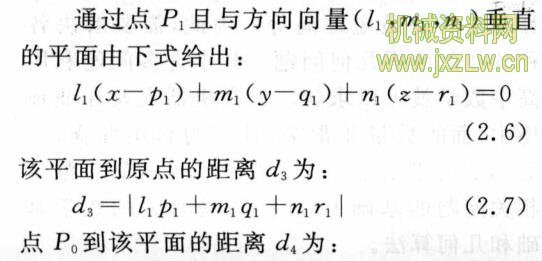
2.平面


当用多边形表示机器人的构件、环境物体的边界面时,有时需要判断从外部的点1向包含该多边形的平面(称为基平面)所作垂线的垂足是否在多边形上。当物体为凸多面体时,设目标多边形的相邻多边形的基平面方向向量均朝向物体外部,且这些平面分别用
来表示,如果对于所有的基平面,把垂足坐标(xf,yf,zf)带人左边时得到负值,那么表示垂足在多边形的内部,否则在多边形的外部。当物体为非凸多面体时,以垂足为始点,在目标多边形的台平面内向任意方向作射线,若该射线与目标多边形的边的交点个数为奇数,则垂足在多边形内部,反之在多边形外部。
下面求两平面的交线。在式(2. 10)中,当i分别取1,2时,所得两个平面存在如下关系:



这表明,除了二者平行和重合,其他情况下一定相交,且交线为一直线。由于该交线的方向向量应垂直于两个平面的法线向量,故可由两个法线向量的外积给出,即
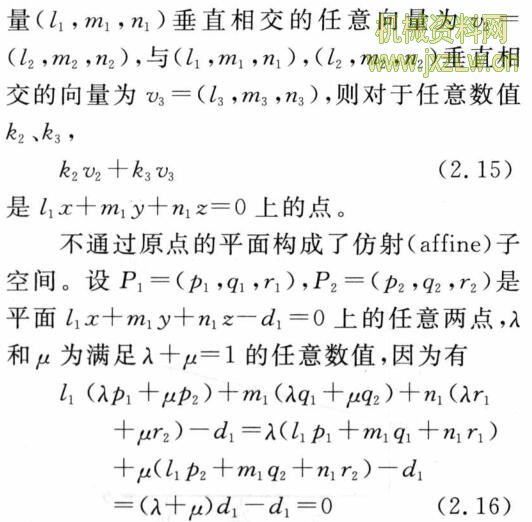
由定义可知,此即仿射子空间。线性子空间为仿射子空间的一种。

3.曲面
机器人零件的各个面都是平面或曲面的一部分。一般情况下,有时人们用Bezier或B-Spline等高次曲面来逼近实际曲面,但在机器人中则仅应用二次曲面。其原因有两个。首先,当采用高次曲面时,物体间的干涉检查和距离计算将变得过于复杂,以至于很多情况下难以求解。其次,在实际工作中,很多情况下采用二次曲面就足够了。二次曲面中,只需要球面和圆柱面就可以满足要求了。
以点P= (p, q, r)为圆心,半径为s的球面由下式给出:
以过点P且与z轴平行的直线为轴,半径为s的圆柱面为

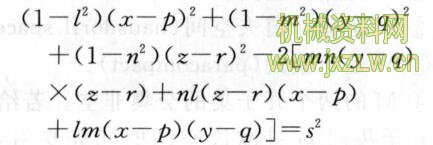
以过点P且与方向向量(l,m,n)平行的直线为轴,半径为s的圆柱面为
上述二次曲面之间的交线可以用解析式求解表达,但一般均通过数值计算来求解。
(责任编辑:laugh521521)
| 文章分享: |
|

















